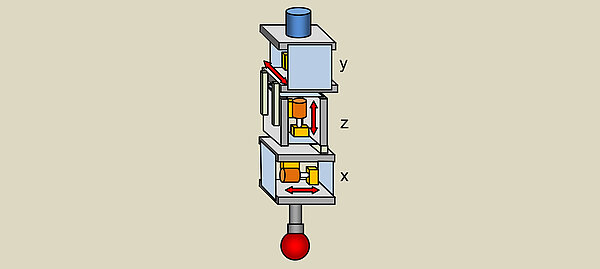
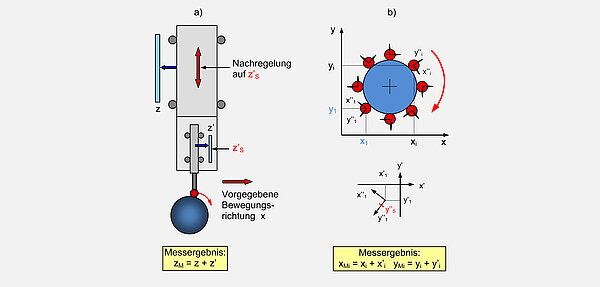
Bei einem messenden Tastsystem verfügt der Sensor über Wegmesssysteme (Maßstäbe, induktive Sensoren, optische Messsysteme) in meist allen drei Koordinatenachsen. Wird die Tastkugel bei Berührung mit dem Messobjekt in einer beliebigen Richtung ausgelenkt, kann die Größe dieser Auslenkung aus den Informationen dieser Wegmesssysteme ermittelt werden (Abb. 28). Der Messpunkt wird durch Überlagerung der Sensorauslenkung mit der Sensorposition im Koordinatensystem des Geräts gewonnen. Hinzu kommt die oben beschriebene Tastkugelkorrektur entsprechend der vektoriellen Lage der anzutastenden Fläche und der Tasterdurchbiegung.
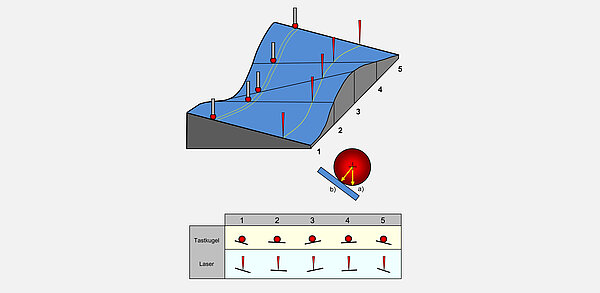
Bedingt durch das messende Prinzip des Tastsystems können während des gesamten Antastvorgangs (Auslenken und Zurückbewegen) ständig Messpunkte erfasst werden. Hieraus lassen sich gemittelte und somit reproduzierbare Messpunkte bestimmen. Auch der komplette Verlauf der Antastung kann aufgenommen und daraus der Antastpunkt für eine angenommene Auslenkung null (Antasten mit 0 N Antastkraft) extrapoliert werden. Dies ist z. B. für das Messen nachgiebiger Werkstücke nützlich.