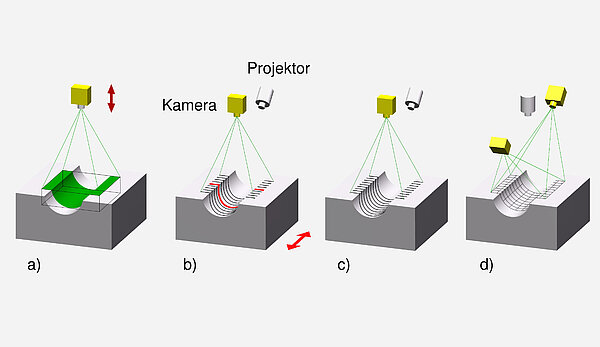
Flächensensoren mit Musterprojektion arbeiten im Grunde nach dem Triangulationsprinzip. Abhängig von der Ausführungsvariante kann in Musterprojektionssensoren und Fotogrammetriesensoren unterschieden werden. Bei beiden Verfahren werden zur Bestimmung der Werkstücktopografie die Winkelbeziehungen zwischen den Strahlengängen für die Abbildung und die Musterprojektion oder zwischen mehreren Abbildungsstrahlengängen oder Kombinationen hieraus herangezogen. Beim Musterprojektionssensor (auch Streifenprojektionssensor, Abb. 19c) wird durch einen Projektor ein Streifenmuster mit exakt bekannter Geometrie auf die Materialoberfläche projiziert.
- Entwicklung
-
Geräte
- Koordinatenmessgeräte mit Kreuztisch
- Koordinatenmessgeräte mit Führungen in einer Ebene
- Koordinatenmessgeräte mit Portal
- Koordinatenmessgeräte mit Drehachsen
- Koordinatenmessgeräte für zweidimensionale Messungen
- Koordinatenmessgeräte mit Röntgentomografie
- Koordinatenmessgeräte für spezielle Anwendungen
- Sensoren
- Software
- Besonderheiten
- Genauigkeit
- Veröffentlichungen
- Literaturseite