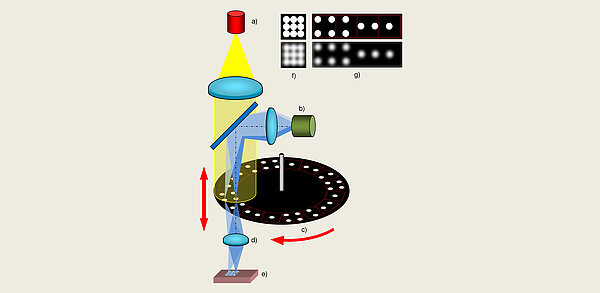
Ein konfokaler Flächensensor (z. B. Werth NFP: Nanofocus Probe, Abb. 24) projiziert Licht über ein Abbildungssystem auf das Objekt. Eine kleine Lochblende reduziert die Größe des Lichtflecks auf einen sehr kleinen Bereich. Wird der Lichtpunkt durch eine Bewegung des Sensorkopfs defokussiert, wird das Licht über eine größere Fläche verteilt und der abgeblendete Lichtpunkt auf dem Objekt dunkler.
- Entwicklung
-
Geräte
- Koordinatenmessgeräte mit Kreuztisch
- Koordinatenmessgeräte mit Führungen in einer Ebene
- Koordinatenmessgeräte mit Portal
- Koordinatenmessgeräte mit Drehachsen
- Koordinatenmessgeräte für zweidimensionale Messungen
- Koordinatenmessgeräte mit Röntgentomografie
- Koordinatenmessgeräte für spezielle Anwendungen
- Sensoren
- Software
- Besonderheiten
- Genauigkeit
- Veröffentlichungen
- Literaturseite